25 января 2024 г. NASA объявило о завершении работы марсианского вертолета Ingenuity («Изобретательность»), потерпевшего аварию в своем 72-м полете.

Летающий зонд был доставлен на Марс вместе с американским марсоходом Perseverance («Упорство») 18 февраля 2021 г. Это был чисто экспериментальный проект, нацеленный на проверку возможности управляемого полета в разреженной атмосфере Марса. Вертолет, созданный специалистами Лаборатории реактивного движения JPL, имел массу около 1.8 кг при высоте 0.49 м. Кубический корпус вмещал привод винта, электронику и камеры. Два соосных винта длиной лопастей по 1.2 м, разгоняемые до 2400 об/мин, поднимали машину в воздух, а приземлялась она на четыре опоры длиной по 0.38 м. Источником электропитания служила солнечная батарея, установленная на конце оси над винтами, а хранился заряд в шести литий-ионных аккумуляторах.

Вертолет, подвешенный под днищем марсохода, был опущен на грунт и 19 апреля 2021 г. выполнил свой первый подъем до трехметровой высоты. Успешно пройдя к 7 мая программу летных испытаний, рассчитанных на 30 суток и пять полетов, вертолет использовался как средство авиационной разведки для обзора местности и выбора оптимального пути движения ровера. За три земных года он выполнил 72 полета общей продолжительностью 128.8 мин и пролетел около 17 км со скоростью до 6.5 м/с; максимальная высота подъема составила 24 м. Вертолет успешно преодолел множество проблем, в том числе и нехватку электроэнергии марсианской зимой, повлекшую регулярные перезагрузки бортового компьютера.
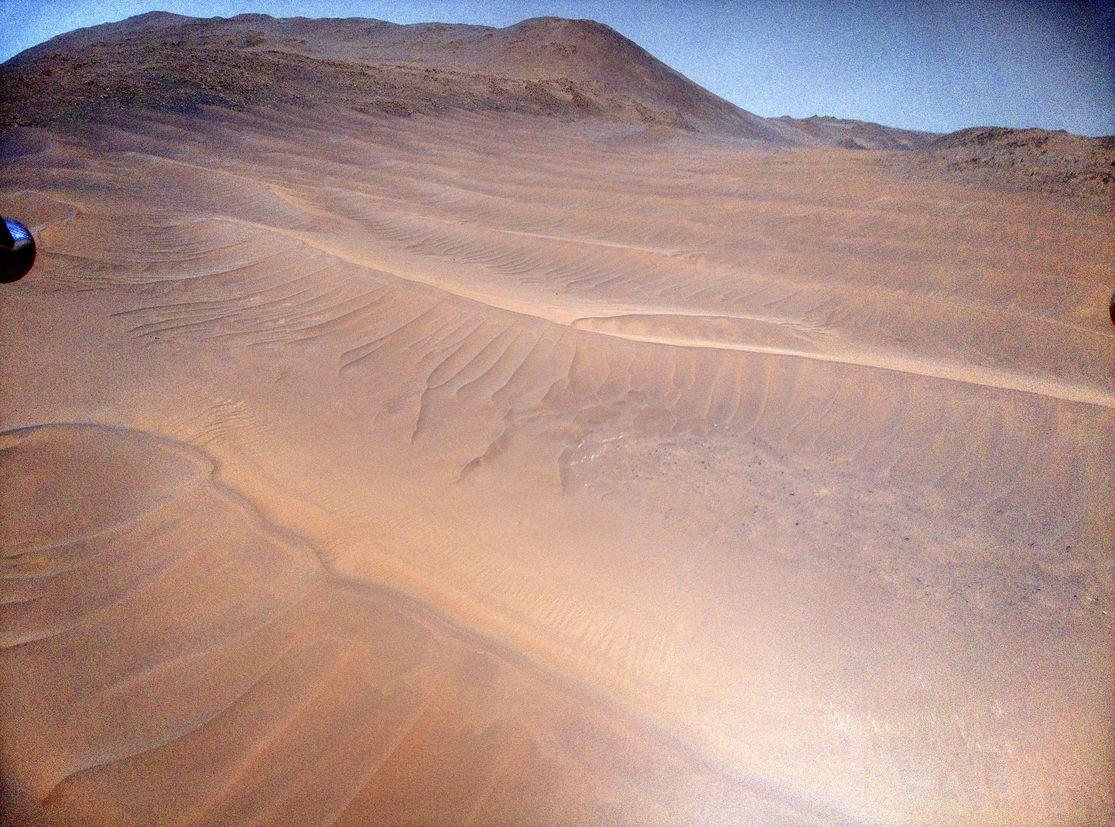
Цветной снимок, сделанный в 70-м полете 22 декабря 2023 г.
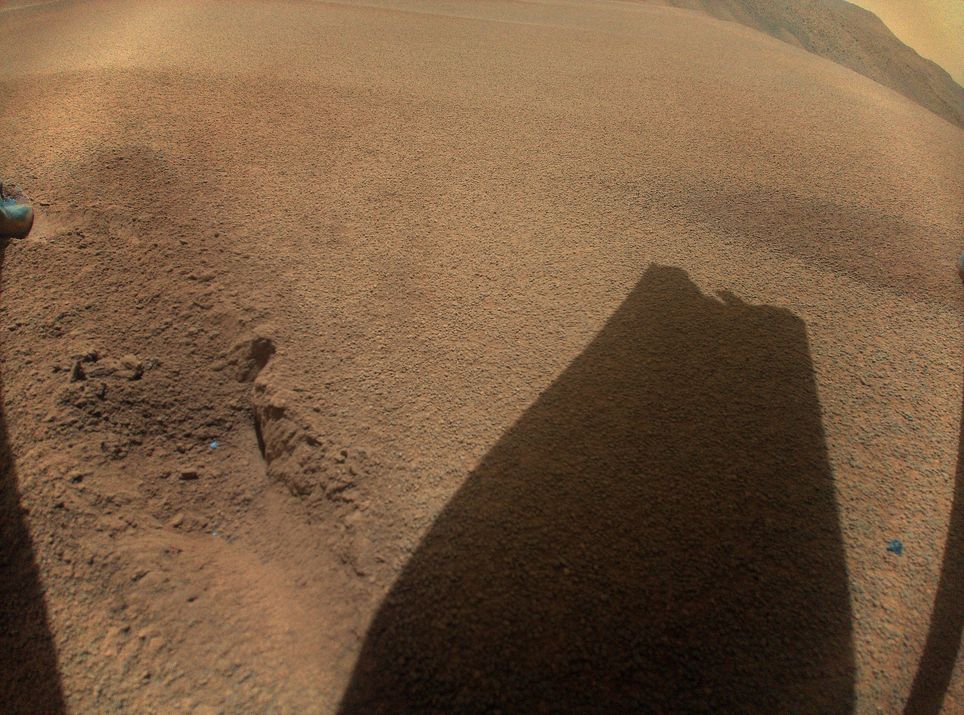
6 января 2024 г. в ходе 71-го полета вертолет прошел только 71 метр пути из 358 запланированных и выполнил досрочную посадку на гребень песчаной дюны. Хотя донная камера обнаружила под зондом свежую борозду непонятного происхождения, вертолет стоял устойчиво, а тень от вращающегося винта выглядела нормально.

Вид с донной камеры после посадки 6 января.
На 18 января был запланирован контрольный подъем на 12 метров продолжительностью 32 секунды для определения местоположения и выбора дальнейшего маршрута. На спуске за секунду до посадки связь между вертолетом и марсоходом неожиданно прервалась; увидеть летающую машину ровер не мог, так как между ними находилась возвышенность.
Тень обломанной лопасти.
Вечером 20 января операторам удалось восстановить радиоконтакт между двумя объектами. Вертолет стоял вертикально и имел положительный баланс по питанию, однако позже переданные с него снимки во время тестового вращения винта показали, что конец одной из лопастей обломан. Анализ показал, что Ingenuity более не способен к управляемому полету, так что остается считать оставшиеся снимки и данные из его памяти и оставить пострадавшую машину памятником самой себе и талантливым инженерам – ее создателям.
Автор: Liss