15 апреля на научном семинаре по исследованиям на дальней ретроградной орбите вокруг Луны была рассказана, а 16 апреля распиарена китайскими СМИ история спасения китайских научных аппаратов DRO-A и DRO-B.
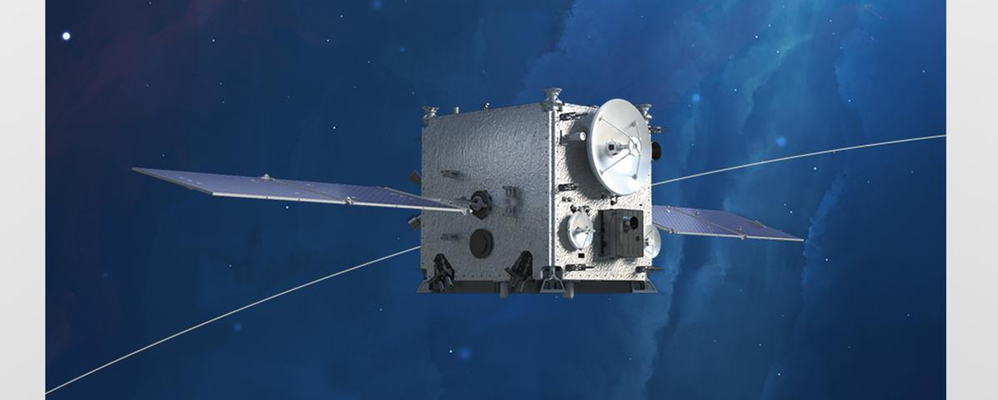
Аппарат DRO-A
Как мы помним (https://novosti-kosmonavtiki.ru/articles/203749/), названные КА были запущены 13 марта 2024 г. с целью доставки на окололунную орбиту и проведения эксперимента по навигационным измерениям в системе из трех спутников: одного DRO-L на низкой околоземной орбите и пары аппаратов на дальней ретроградной орбите вокруг Луны, проходящей в 70-100 тысячах километров от нее. Предполагалось, что околоземный аппарат DRO-L будет отслеживать в частотном диапазоне K оба окололунных, и по разнице в ответных сигналах с учетом текущего расстояния между ними можно будет определить положение каждого. Все спутники спроектировала и изготовила Инновационная исследовательская академия микроспутников в Шанхае. Постановщиком эксперимента выступил Инженерно-технический центр использования космоса Китайской АН.
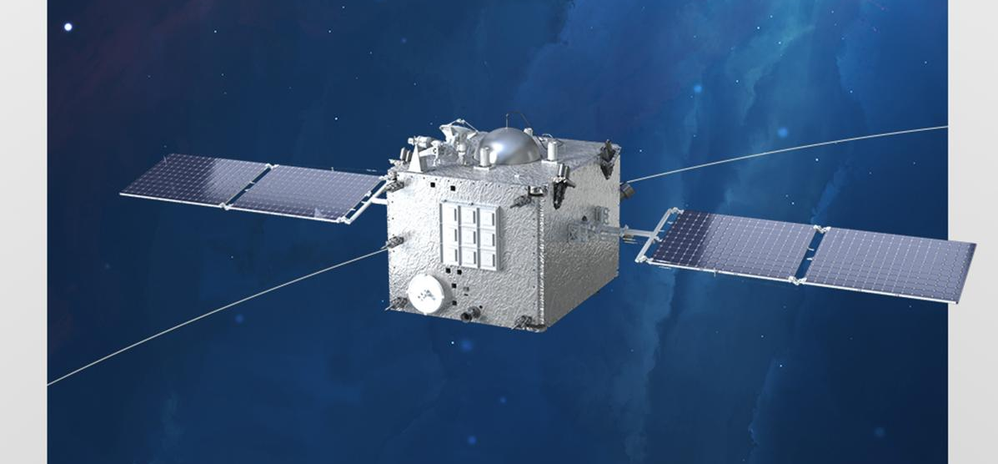
Аппарат DRO-B
Спутник DRO-L массой 152 кг был успешно выведен на орбиту 3 февраля 2024 г. на ракете SD-3 с морской платформы в Южно-Китайском море в компании с несколькими КА с иными задачами (https://novosti-kosmonavtiki.ru/articles/203459/).

Аппарат DRO-L
Во втором запуске носитель CZ-2C и дополнительный разгонный блок YZ-1S должны были доставить связку из двух КА DRO-A (308 кг) и DRO-B (277 кг) на переходную орбиту с апогеем 292000 км. Возможно, предполагалось в момент прохождения Луны над парой аппаратов в апогее выдать дополнительный импульс и перейти на далекую ретроградную орбиту, но это догадка – номинальный план полета китайцы не обнародовали.
Старт с Сичана состоялся 13 марта в 20:51 пекинского времени (12:51 UTC). Примерно через девять минут прошло отделение головного блока, после чего YZ-1S выполнил маневр довыведения на опорную орбиту. Второй импульс должен был выдаваться после 90-минутной паузы, на втором витке. Однако сопровождение на этапе второго включения было сбойным, сигнал отделения связки спутников получен не был. Их удалось услышать лишь через 40 минут. Измерения показали, что апогей орбиты намного ниже расчетного – около 134000 км. (Американцы, независимо определившие орбиту наклонением 27.7° и высотой 525×132578 км, оказались весьма точны.)
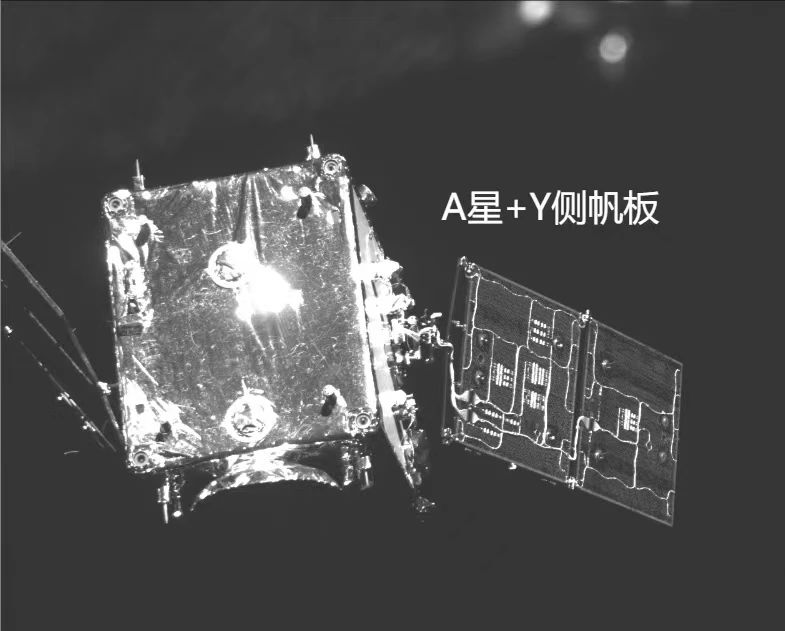
Отогнутые солнечные батареи DRO-A
Второй и более острой проблемой было быстрое вращение связки общей массой 581 кг – ее угловая скорость превышала 200° в секунду. В таком режиме аппараты не могли получать достаточную мощность от солнечных батарей, да и сами они могли в любой момент оторваться под действием центробежной силы.
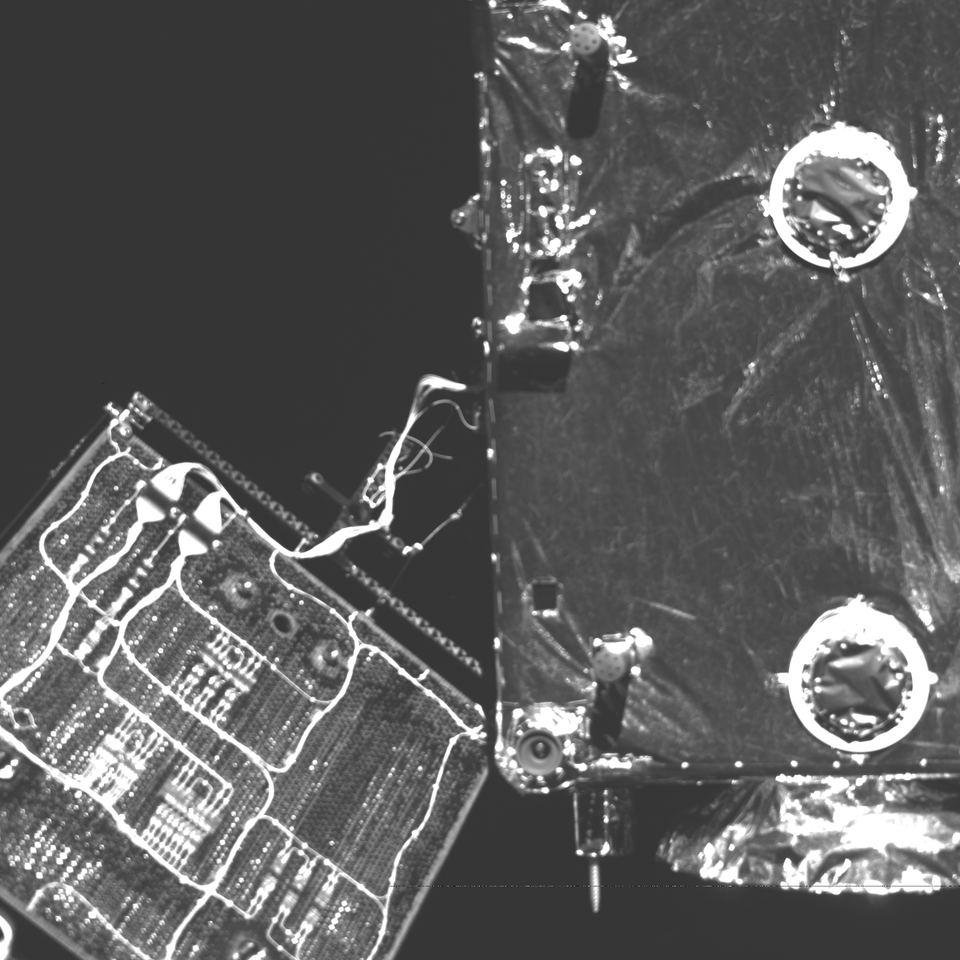
Оторванная солнечная батарея DRO-B
В полночь руководители проекта – командующий Гао Мин (高铭), его заместитель Ван Цян (王强), главный конструктор Лин Баоцзюнь (林宝军), его заместитель Ли Сюйчжи (李绪志) и 77-летний научный консультант академик Гу Идун (顾逸东) организовали спасательную операцию. В 03:00 на DRO-B были включены двигатели ориентации, которые за 20 минут остановили аварийное вращение. Телеметрия показала, что на более крупном спутнике DRO-A солнечные батареи не зафиксированы в рабочем положении, а на DRO-B и вовсе смотрят «кто куда». Тем не менее после семичасовых поисков удалось сориентировать связку так, чтобы получить положительный баланс по питанию – появился смысл в дальнейшей работе.

Гу Идун и его молодые сотрудники
Бортового запаса топлива спутников не хватало на подъем апогея до заданного и последующие маневры по штатной схеме. Запасного баллистического плана на случай аварийного выведения не было, его пришлось искать на лету. В течение 14-16 марта, написав за 40 часов непрерывной работы 20000 строк кода, специалисты нашли решение – сложную траекторию с двумя гравитационными маневрами у Луны. Первый маневр нужно было провести не позднее 18 марта, иначе шансов выйти на заданную орбиту не осталось бы. В новом плане нужны были двигатели и запас топлива обоих КА, поэтому их разделение отложили на будущее.
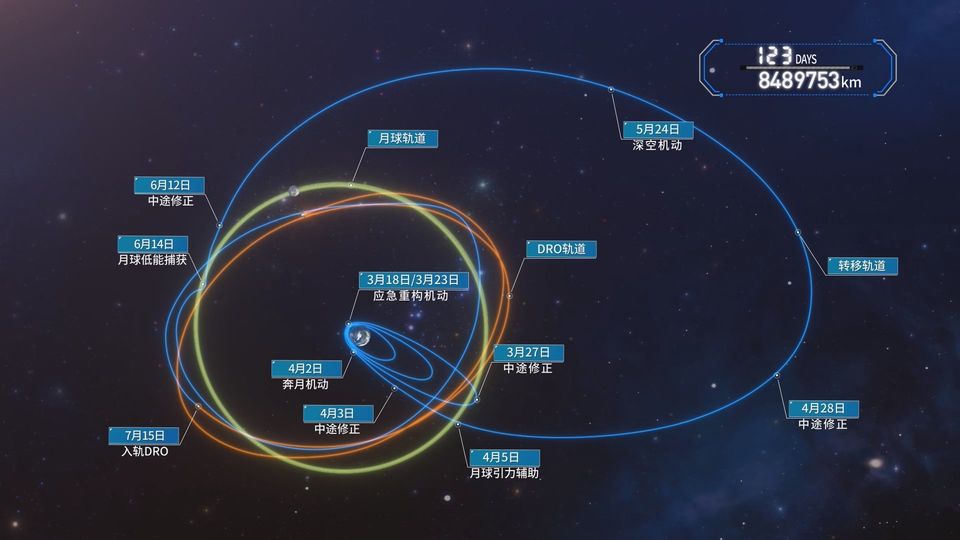
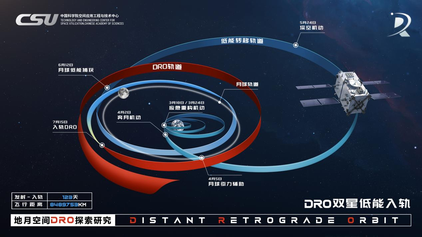
Основные события от запуска DRO-A/B до выхода на окололунную орбиту
18 марта в 12:42 пекинского времени двигатель КА был включен на 1260 секунд и обеспечил подъем апогея до 240000 км. (Американцы измерили 971×225195 км.) Второй импульс 23 марта поднял апогей до 380000 км. 27 марта вблизи апогея провели коррекцию траектории. Третий маневр 2 апреля перевел пару спутников на траекторию встречи с Луной, а коррекция 3 апреля задала окончательные условия пролета, который состоялся 5 апреля.
28 апреля состоялась малая, а 24 мая – большая коррекция, известная с легкой руки американских баллистиков как «маневр в дальнем космосе». Смысл ее состоял в оптимальном сопряжении двух траекторий – отлетной от Луны и подлетной к ней. 12 июня на подлете провели еще одну коррекцию, и 14 июня состоялась повторная встреча с Луной с захватом связки ее гравитационным полем.
15 июля спасательная операция благополучно завершилась. Пройдя за 123 дня 8.5 млн км в системе отсчета, связанной с Землей, блок из двух аппаратов вышел на требуемую орбиту высотой от 70000 до 100000 км над Луной. 22 августа о спасении спутников сообщила гонконгская South China Morning Post; китайские СМИ по неведомым причинам промолчали.

Расстыковка КА 28 августа 2024 г.
28 августа спутники разделились и сфотографировали друг друга. Лишь теперь операторы и разработчики смогли увидеть воочию то, на что указывала телеметрия. Солнечная батарея аппарата DRO-A оказалась отогнута на 90° от штатного положения, а на DRO-B выглядела просто сломанной – но работала!
30 августа 2024 г. на окололунной орбите начались эксперименты по межспутниковым измерениям в частотном диапазоне. Китайские специалисты сообщают, что за три часа межспутниковых измерений удается определить параметры орбит с такой же точностью, какую дает двухсуточная работа наземных средств. Вероятно, они проводились и ранее, еще на этапе перелета, так как в публикациях называлась максимальная дальность радиоканала 1.17 млн км.
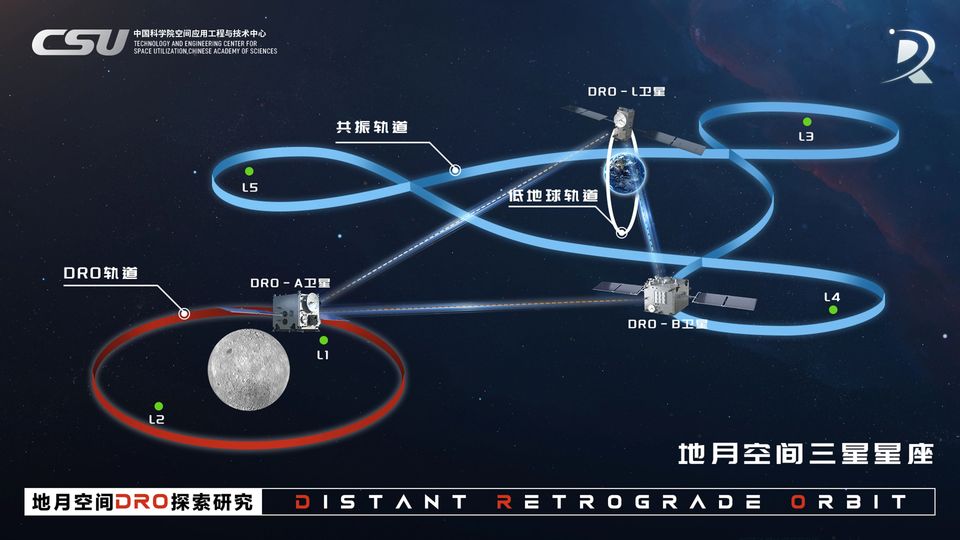
Перспективная конфигурация группировки DRO
В настоящее время спутник A продолжает работу на окололунной орбите. В конце марта 2025 г. аппарат B покинул DRO с целью перехода на так называемую резонансную орбиту в системе Земля – Луна. С нашей земной точки зрения это высокий эллипс, в апогее которого аппарат приближается к орбите Луны, а период обращения близок к 1/3 лунного месяца. Как следствие, во вращающейся системе отсчета траектория образует повторяющийся трилистник, вершины которого направлены к точкам Лагранжа L3, L4 и L5 системы Земля – Луна.
Автор: Liss