Пришла пора познакомить читателей новостей японской космонавтики с токийским стартапом GITAI, основанным в июле 2016 г. и специализирующемся на космической робототехнике. Главой и отцом-основателем компании, также имеющей в своем распоряжении филиал в Сан-Франциско (штат Калифорния), является Наканосэ Сё (中ノ瀬 翔).
 Глава GITAI
Глава GITAI
В сентябре 2016 г. GITAI получил от Skyland Ventures 140 тыс долл, в ноябре 2017 г. – 1.25 млн долл от ANRI и 500 Startups Japan, а в июне 2019 г. – 4.1 млн долл от Spiral Ventures, DBJ Capital, J-Power и 500 Startups Japan. В феврале 2021 г. стартап из разных источников привлек финансирование в размере 17.1 млн долл.
Пройдемся по начальным этапам развития деятельности компании GITAI (義体), название которой, собственно говоря, означает «искусственное тело/тела».
Итак, в декабре 2018 г. стартап подписал соглашение с Японским агентством аэрокосмических исследований JAXA о проведении совместных испытаний роботов в наземном макете «Кибо» в Космическом центре Цукуба (префектура Ибараки). 25-27 декабря того же года роботы из синтетической кожи вон лезли, чтобы без нареканий выполнить работы, которые обыкновенно делают японские астронавты в своем модуле, находясь на МКС. И преуспели в этом на 72% – выполнили 13 из 18 заданий.
 Испытания в макете «Кибо». КЦ Цукуба
Испытания в макете «Кибо». КЦ Цукуба
В марте 2019 г. GITAI заключило меморандум о совместной деятельности с крупнейшим в Азии поставщиком спутниковой связи – корпорацией SKY Perfect JSAT.
В абсолютно том же месяце и опять же с JAXA стартап подписал соглашение, в рамках которого были запланированы аналогичные проводившимся в наземном «Кибо» робототехнические тесты, но с одной существенной оговоркой – теперь «испытательным плацдармом» выступит настоящий японский модуль, находящийся в составе МКС.
В декабре 2019 г. представители GITAI с двухдневным визитом посетили магнитогорское предприятие НПО «Андроидная техника» (Челябинская область) – то самое, что разработало российского антропоморфного робота Skybot F-850 или FEDOR (Final Experimental Demonstration Object Research), и который в период с 27 августа по 6 сентября 2019 г. в рамках эксперимента «Испытатель» в копирующем (машина повторяет движения оператора) и автоматическом режимах управления тестировался на МКС.
Делегация познакомилась с разработками НПО, и в особенности обсудила с российскими коллегами вопросы безопасности и требований к космическим роботам. В итоге японцы и магнитогорцы договорились об осуществлении совместной деятельности, а на I квартал 2020 г. даже планировался эксперимент по двустороннему дистанционному управлению: оператор из Урала должен был управлять роботом, находящимся в Токио, а японский оператор – магнитогорской «железякой». Расстояние между двумя городами составляет 6317 км, поэтому был бы получен хороший опыт дистанционного управления, который бы безусловно пригодился для создания и эксплуатации робототехнических комплексов на Луне. К сожалению, больше информации не поступало…
В любом случае хочется только пожелать «Андроидной технике» плодотворного международного сотрудничества в будущем.
Испытания на МКС
В сентябре 2020 г. наши старые знакомые JAXA и GITAI начали продумывать концепцию роботов-рабочих для космоса, включающую не только технологии, но и предоставление соответствующих услуг. Место применения технологий дистанционного управления – МКС и новые космические станции, в частности Gateway, напланетные базы, ну и куда же без миссий американской лунной программы Artemis.
15 декабря 2020 г. стартап сообщил о проведении успешных, но пока еще наземных испытаний разрабатываемой руки-манипулятора (модель S1), в которых проверялась ее автономная работа. Следует сказать, что ранее испытания уже проводились, но руке доверяли наипростейшие задания – повернуть переключатель и подключить или выдернуть кабели. Сейчас же все усложнилось на порядок.
«Однорукий бандит» выполнял точно такие же сборочные задачи, какие бы он вероятно получил, если бы работал на космической станции – S1 соорудил из продолговатых деталей опорные конструкции и собрал что-то вроде панелей – структуры с большой площадью поверхности, которыми в реальности, если мы говорим о космической сборке, могли оказаться преобразующие солнечную энергию фотовольтаические панели, антенны или зеркала телескопов.
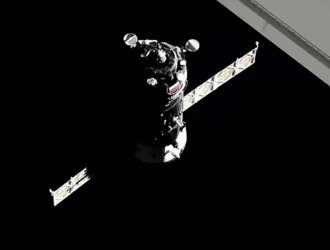
Наконец, 29 августа 2021 г. на ракете Falcon 9 компании SpaceX к МКС был запущен очередной грузовой корабль Dragon (миссия снабжения SpaceX CRS-23 или SpX-23). Кроме оборудования и материалов для проведения научных экспериментов, продовольственных запасов, предметов первой необходимости для членов экипажа и прочих грузов, грузовик, 30 августа пристыковавшись к станции, доставил также руку-манипулятор GITAI S1 Robotic Arm Tech Demo (Nanoracks-GITAI Robotic Arm). Проверить S1 не в «поддельном» макете модуля, а в реальном планировалось в октябре.
 Эксперимент по сборке в шлюзе Bishop
Эксперимент по сборке в шлюзе Bishop
Настоящее международное признание японский стартап «Искусственные тела», надо полагать, получил только осенью сего года – с 13 по 17 октября в частном шлюзе-модуле Bishop Airlock (компании Nanoracks) прошла серия испытаний. Этот шлюз, кстати, «новенький» на станции – в декабре 2020 г. его доставили на МКС на грузовом корабле Cargo Dragon (миссия SpX-21) и вскоре установили на внешней поверхности американского модуля Tranquility.
Предварительно размещенная американскими астронавтами в модуле Bishop японская рука-манипулятор с восемью степенями свободы выполнила все тесты просто великолепно, несмотря на то, что такая технология была испробована в космосе впервые. Автономная модель S1, как и в наземных испытаниях, собирала панели, «расключала» кабели и нажимала на кнопки.
В необычный эксперимент были добавлены дополнительные действующие лица – из комнаты управления Nanoracks, расположенной в ЦУПе NASA в Хьюстоне (штат Техас), специалисты в удаленном режиме попробовали при помощи роботизированной руки поработать с переключателями и кабелем, и это тоже удалось выполнить на отлично.
Луноход и манипулятор для ровера
26 июля 2021 г. стартап GITAI сообщил, что приступил к разработке лунохода и показал видео (https://www.youtube.com/watch?v=yK5KZ59FhJU) успешных испытаний его первого прототипа! Вот так-то – нежданно, негаданно…
 Луноход GITAI
Луноход GITAI
Луноход создается компанией с целями исследования поверхности Селены, проведения геологоразведочных работ и разработки месторождений полезных ископаемых, оказания помощи при строительстве баз на спутнике, а также проведения осмотров и технического обслуживания лунной техники.
В рамках испытаний луноход набирал высокую скорость движения, пересекал неутрамбованную неровную местность, составлял 3D-карту исследуемой территории, пробовал бурить поверхность электродрелью и собирал камешки-образцы. Разработка будет продолжена, а проверку лунохода в деле – на Луне – компания надеется осуществить около 2025 г.
А теперь мысленно вернемся от последней новости на месяц назад – 25 июня GITAI и компания Toyota Motor Corporation подписали соглашение о совместных исследованиях, направленных на разработку роботизированной руки для герметичного лунного ровера LUNAR CRUISER, создаваемого JAXA совместно с корпорацией Toyota, и планируемого к доставке на лунную поверхность во второй половине 2020-х гг.
На основе данного соглашения GITAI приступила к исследованиям и разработке макета (breadboard model) руки-манипулятора, который в декабре, перед новогодними праздниками, так сказать, представила на суд публики. Робототехническое устройство в конечном варианте будет обладать различными функциями – помогать проводить исследования, осмотр и даже техобслуживание техники на поверхности Луны. При этом, оно будет удобным в эксплуатации и максимально мобильным, а не стационарным.
 Концевое захватное устройство
Концевое захватное устройство
С этой целью прорабатываются его многочисленные составляющие – концевые захватные устройства (grappled end effector), устанавливаемые на обоих концах манипулятора, другие концевые устройства (end effector tool), а также захватные приспособления (grapple fixture), которые можно крепить к наружной поверхности ровера
 Захватное приспособление
Захватное приспособление
Разрабатываемое GITAI концевое захватное устройство может входить в захватное приспособление, находящееся как на горизонтальной, так и на вертикальной (на двери ровера, например) поверхности, по принципу разъёмов «мама-папа» и закрепляться. Важно, что после механической «стыковки» теперь уже единый механизм имеет общую электрику и связь. К захватному приспособлению можно будет стыковать и другие всевозможные концевые устройства и приспособления, а также крепить его к поверхности лунных роверов или стенок лунных домов.
Причём, все эти приспособления проектируются съёмными, чтобы для выполнения конкретной задачи можно было выбрать из нескольких насадок одной руки-манипулятора нужную, а для решения следующей – поменять на новую.
Такие концевые захваты можно будет использовать для подъема, осмотра и техобслуживания ровера, а на самих захватных приспособлениях планируется встроить зарядные устройства – тогда во время проведения манипуляций робототехническая рука будет постепенно подзаряжаться.
GITAI и Toyota продолжают свои разработки, а им предстоит немало работы: ровер должен иметь автономное управление и быть стойким к очень агрессивным условиям окружающей среды на Луне – низкой гравитации, вакууму, сверхнизким температурам и сильному перепаду температур, а также должен свободно передвигаться по лунному реголиту и выдерживать космическую радиацию.
Вообще GITAI, как и многие стартапы, стремительно ворвался в нашу жизнь и поставил себе целью освоить все необходимые технологии, чтобы к 2040 г. стать полноправным партнёром мировых компаний и вместе с ними создавать космические поселения на Луне и Марсе.
В настоящее время компания прорабатывает следующие направления робототехники:
— внекорабельная деятельность на космических станциях;
— орбитальные услуги, охватывающие стыковку со спутниками, их ремонт, техобслуживание и продление срока эксплуатации, удаление космического мусора;
— исследовательская деятельность на Луне и строительство напланетных баз.
Евгений Рыжков
Источники
https://prtimes.jp/main/html/rd/p/000000004.000042239.html
https://npo-at.com/news/na-lunu
https://gitai.tech/2020/12/15/isa_ground_experiment_jp/
https://gitai.tech/2021/10/28/iss-tech-demo-ja/
https://www.nasa.gov/mission_pages/station/research/experiments/explorer/Investigation.html?#id=8321